
1引言
在大功率电力电子器件应用中,IGBT已取代GTR或MOsF龃成为主流。心盯的优点在予输入阻抗高、开关损耗小、饱和压降低、通断速度快、热稳定性能好、耐高压且承受大电流、驱动电路简单。目前,由妇BT单元构成的功率模块在智能化方面得到了迅速发展,智能功率模块(IPM)不仅包括基本组合单元和驱动电路,还具有保护和报警功能。IPM以其完善的功能和高可靠性创造了很好的应用条件,利用IPM的控制功能,与微处理器相结合,可方便地构成智能功率控制系统。IGBT一IPM模块适用变频器、直流调速系统、DC—DC变换器以及有源电力滤波器等,其中富士R系列IGBT一IPM是应用较广泛的产品之一。
2 IGBll_IPM的结构
IPMⅡ模块有6单元或7单元结构,用陶瓷基板作绝缘构造,基板可直接安装在散热器上,控制输入端为2.54 m标准单排封装,可用一个通用连接器直接与印刷电路板相连。主电源输入(P,N)、制动输出(B)及输出端(u,v,w)分别就近配置,主配线方便;主端子用M5螺钉,可实现电流传输。
IPM的结构框图如图l所示,其基本结构为IGBT单元组成的三相桥臂;内含续流二极管、制动用IG明和制动用续流二极管;内置驱动电路、保护电路和报警输出电路。IPM共有6个主回路端(P,N,B,u,v,w)、16个控制端,其中vccu、vccv、vccw分别为u、v、w相上桥臂控制电源输入的+端,GNDU、GNDV、GNDW分别为对应的一端;Vinu、vinV、vinW分别为上桥臂u、v、w相控制信号输入端,vcc、GND为下桥臂公用控制电源输入;vinX、vinY、vinZ分别为下桥臂x、Y、z相控制信号输入端;vinDB为制动单元控制信号输入端;ALM为保护电路动作时的报警信号输出端。
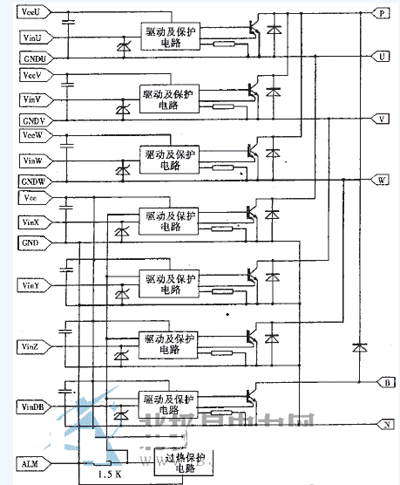
图1 IPM结构框图
R系列IGBT—IPM产品包括:中容量600v系列50A~150A、1200v系列25A~75A;大容量600v系列200A~300A、1200v系列100A一150A。共计20多个品种。
3功能特点
3.1 IGBT驱动功能
全部IGBT的驱动功能为内置。采用软开关控制,分别使用单独门极电阻,根据驱动元件的特性,可独立地控制各自的开关山/dl。单电源驱动无需反偏电源,共需4组独立驱动电源,上桥臂侧3组独立,下桥臂侧1组公用。由于设计为低阻抗接地方式,可防止因噪声而产生的误导通。
3.2过电流保护功能
通过检测IGBT集电极电流进行过电流保护,如集电极电流超过容许值6—8 ps,则软关断IGBT,由于有6—8ps的保护动作延时,瞬间过电流及噪声不会导致误动作。同时还具有防止误动作闭锁功能,在保护动作闭锁期间,即使有控制信号输入,IGBT也不工作。
3.3短路保护功能
过电流保护动作时,短路保护将联动,能抑制因负载短路及桥臂短路的峰值电流。短路保护及过电流保护实际上均是对IGBT的集点极电流进行检测,无论哪个IGBT发生异常都可保护,由于电流检测内置,故无需另加检测元件。
3.4控制电源欠电压保护
当控制电源电压Vcc下降到容许的下限值时,如果输入信号为ON,则IGBT软关断,输出警报。欠压保护采用滞环控制方式,即当Vcc恢复至上限值时,如输入信号为OFF,则解除报警。
3.5管壳及关芯温度过热保护
从用与IGBT、续流二极管管芯装在同一陶瓷基板上的测温元件检测基板温度,同时采用与IGBT管芯在一起的测温元件检测IGBT管芯温度。当检测出的温度超越保护温度值并持续1ms后,过热保护动作,IGBT 被软关断,在2ms的闭锁期间停止工作。
306警报输出功能
在下桥臂侧各种保护动作闭锁期间,输出报警信号,如控制输入为ON状态,即使闭锁期已结束,报警输出功能也不复位,等到控制输入变为OFF时,报警复位,保护动作解除。
3.7制动用IGBT及续流二极管
在制动单元中使用的IGBT及续流二极管为内置,外界耗能电阻即可构成制动回路,小号减速时的回馈能量,抑制直流测电压的升高。
4 IGBT一IPM的应用
IGBT一IPM既可以用于单相电路也可用于三相电路,用户只需在主接线端接上电源及负载,并向模块提供控制电源及驱动信号,配线即告完成,电路即可工作。为了提高模块的整体应用性能,且便于连接微处理器.驱动信号一般由光耦外围电路产生。
4.1外围驱动电路
外围驱动电路主要是使控制输入信号通过光电耦合器传送,设计时可选择HcPI一1505、HC-PL_4506、TLP一759、TLP559等型号的光电耦合器,并使光耦与IPM控制端子间的布线最短,布线阻抗最小。
以上推荐型号的光电耦合器均为发光二极管驱动方式,dv/dt的耐量小,故采用光耦阴极接限流电阻的驱动电路形式,完整的外围驱动电路如图2所示。
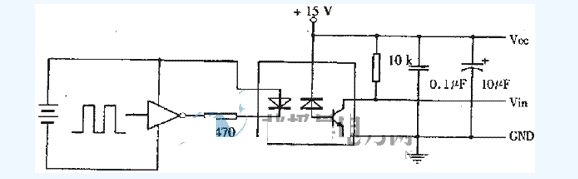
图2 外围驱动电路
4.2如图3所示为IGBT-IPM应用于电机变频调速时的电路原理图,其结构为交-直-交电压型变频器,通过PWM信号控制IGBT的导通,得到频率可变的交流输出,则可实现交流电机的无极调速。
图3中,外围驱动单元共7组,上桥臂用3组,下桥臂用3组,制动用1组;控制电源共4组,上桥臂用3组,下桥臂与制动单元公用1组。P、N为主电源输入端(整流输入),U、V、W接三相异步电机,P、B端接制动耗能电阻。
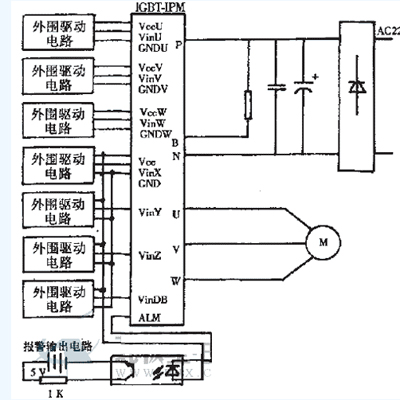
图3应用电路1(变频调速)
如图4所示为IGBT一IPM应用于有源电力滤波器的电路原理图。众所周知,由于接人电力系统的非线性负载融益增多,致使电力系统的电流渡形发生畸变,重影响电网供电质量及电气设备的正常安全运行。有源电力滤波器是一种用于动态抑制谐波和补偿无功的新型电力电子装置,它以实时检测为基础,通过IPM信号控制IGBT的导通,输出电流对畸变波形实时跟踪补偿,从而使电源侧的电流波形与电压波形一致。图4中,外围驱动单元及链接与图3相同,主接线端P、N接有源电力滤波器直流侧大电容C,U、V、W为有源电力滤波器的交流侧输出端,通过电感L与电网相并联,起补偿谐波电流的作用。
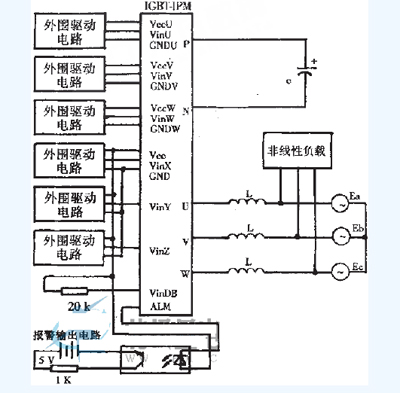
图4 应用电路2(有源电力滤波器)
5 应用中的注意事项
(1) 主电源电压范围:600V系列400V以下,1200V系列800V以下,主电源过呀保护的动作电压分别按450V、900V整定。由于开关时的di/dt在IPM内部布线的电感上会产生浪涌电压,为将浪涌电压抑制在最大值(600V系列500V,1200V系列1000V)以内,可在最靠近P、N端子处安装浪涌吸收器。
(2) 控制电源Vcc电压范围:15V±10%,制作控制电源时,应尽量降低纹波电压,还要使电源的附加噪声降到最小。可在控制电源输出端接10 pF及o.1卜F的滤波电容,保持电源平稳,修正线路阻抗。
(3) 虽然IPM内部已对外部噪声采取了相应的措施,但由于噪声的种类及强度不同,也不可能完全避免发生误动作或损坏IGBT,因此,对加于IPM的噪声,应采取足够的防范措施,如对Ac进线加噪声滤波器,加装绝缘接地;在每相的输入信号与地(GND)间加1000 pF的吸收电容
(4) 过流保护及短路保护功能是以检测到的IGBT集电极电流而动作的,但并不检测续流二极管的阳极电流,因而对续流二极管的异常电流无法保护。
除IPM的内置保护功能外,为了使器件可靠工作、防止损坏,还应在主电路的交、直流侧增加阻容保护和快速熔断器保护。
(5) 由于IGBT的关断时间t。g的最大值为3.6us,故在输入控制信号时,应设置4us的开关死区,防止在通断切换过程中同一桥臂的IPM同时导通。
(6) IPM的内置保护功能仅针对非重复性异常现象的保护,使用时不能长时间超过额定值。当有报警信号输出时,应马上停止输入信号,.关闭机器。由于IPM的保护动作能自动复位,应在排除故障后再启动。
(7) 上桥臂侧仅有保护动作而无报警输出,下桥臂侧出现异常时才有报警输出。实际上大多数异常情况,如过载、短路等最终都将通过下桥臂侧的故障反映出来。
(8) 在内置制动单元的Ⅱw中,当不使用制动时,应将册输入端子接20K盼上拉电阻连于vcc,否则,dv/dt可能引起误动作。而对于6封装(无制动单元)类型,应将B端子接到N或P电位上,避免在悬空状态下使用。
(9) 电源上电时应先接通控制电源vcc,然后再加主电源。如果先上主电源,则可能在保护功能还未起作用时,IPM已损坏。
(10) 由于IPM大多工作在邢Ⅲ信号控制的高频开关状态,且电流较大,温度上升较快,即使有过热保护功能,但急剧的温度上升对IGBT的安全不利。因此,散热器的设计务必有充足的裕量保证管芯结温在额定值以内,散热器的平整度。0~+100 um,,粗糙度lO um以下,IGBT工作时应配有风扇降温。
本系统软件由主程序、波形发生程序、故障中断管理程序及键盘扫描程序、显示输出等几个程序构成。主程序流程如图8所示。
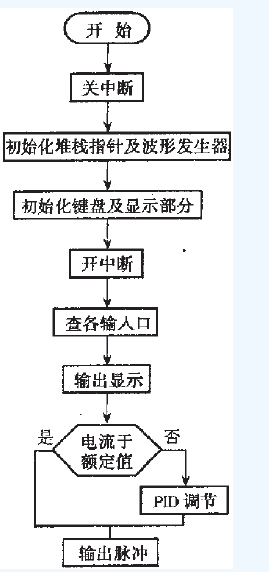
图8 主程序流程图
5 实验结果
根据上述软硬件设计方案,设计并制作了—个软启动器,被控对象为30kw的感应电机,其额定转速为1400r/miIl,其负载电流波形如图9所示。
实验结果表明,本装置运行良好,在达到额定频率时能自动叨换且切换扰动小。

图9 负载电流波形
6结束语
本文介绍了采用单片机与可控硅制作的一种新型软启动器,变频式限流启动使启动器的启动电流具有谐波小、启动转矩大等优点,并且还具有相序自动跟踪的功能,从而其零电流关断电路大大地简化了装置。实验证明,本装置具有结构简单、成本低以及静动态特性好等特点。
参考文献:
【1】何立民.单片机应用系统设计【M】.北京:航空航天大学出版社,2001
【2】李序葆,赵永健.电力电子器件及其应用【M】.北京:机械工业出版社,1998.
【3】陈伯时.电力拖动自动控制系统[M】.上海:上海工业大学。1991.





